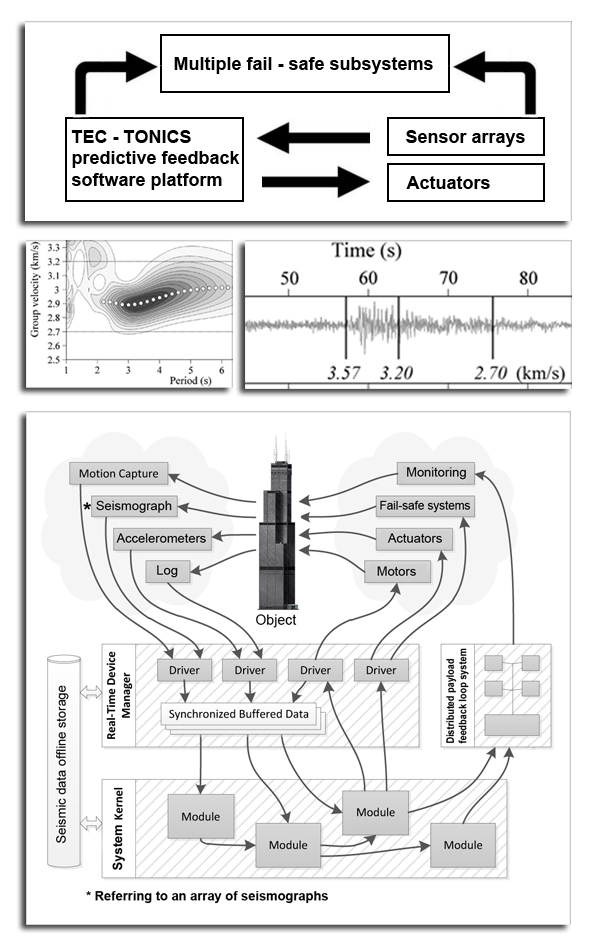
A predictive feedback is created from input coming from detection of ground movement coming from an array of seismographs and the system’s motors and actuators.
The feedback is performed in such a way that the motors inverse the incoming ground movement to cancel any payload movement.
Part of the prediction algorithms rely on the correlations between the P-waves and the S-waves present in all seismic events.
{kind=link}